CONCEPTOS CINEMÁTICOS
1. Sistema de referencia y vector posición
Mira el siguiente video sobre sistema de referencia:
El vector posición es una magnitud vectorial que se mide en unidades de longitud y corresponde al lugar geométrico espacial que tiene el cuerpo en un instante dado.
En la figura se observa un auto que se movió en la recta horizontal, se ha tomado como sistema de referencia el eje x en el que se ha fijado su origen, se indica el vector posición inicial para el auto y el vector posición final.
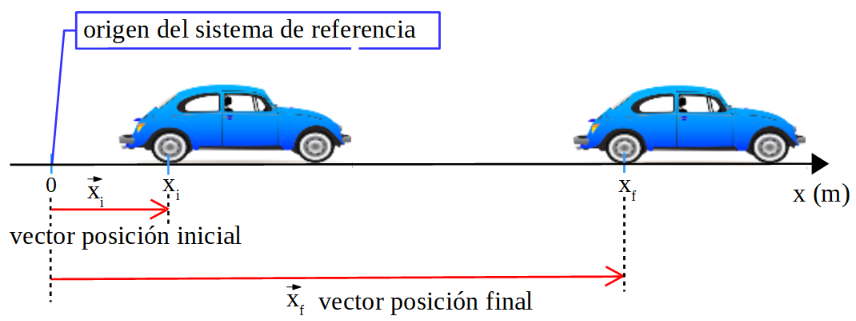
Cabe destacar que el vector posición inicial y final cambian si se modifica el origen del sistema de referencia (si cambia el observador).
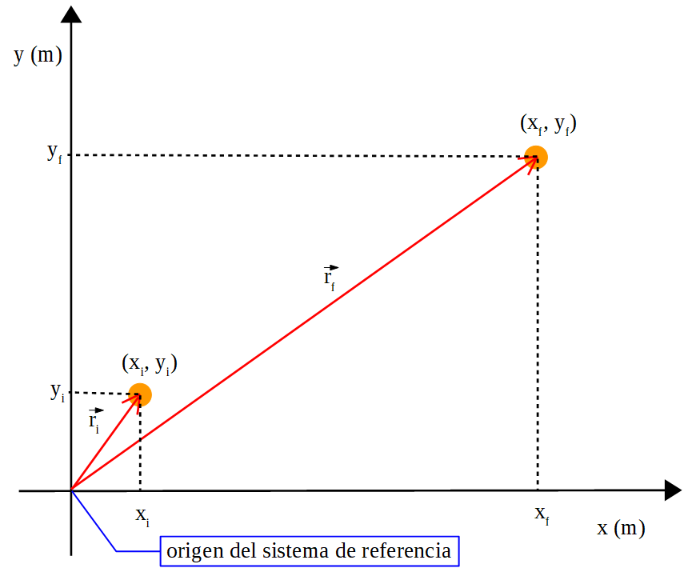
También se puede elegir un sistema de referencia usando los ejes cartesianos en dos y tres dimensiones, dependiendo del movimiento que describa el sistema en estudio. Allí se necesitan más coordenadas para ubicar la posición inicial y final del sistema, y por tanto, los vectores posición, en el caso de dos dimensiones las coordenadas serán (x, y), en el caso de tres dimensiones serán (x, y, z).
La figura de abajo muestra el cambio de posición de una pelota. Se ha tomado para ubicar la posición inicial (xi, yi) y final (xf, yf) un sistema de referencia usando los ejes cartesianos (x,y). Están representados los vectores posición inicial (![]() ) y final (
) y final (![]() ) de la pelota. Estos vectores tienen su origen en el origen del sistema de referencia y su extremo en la posición inicial y final respectivamente.
) de la pelota. Estos vectores tienen su origen en el origen del sistema de referencia y su extremo en la posición inicial y final respectivamente.
Análogamente si se agrega la tercera dimensión, se agrega otra coordenada, no se planteará porque excede los objetivos de este curso.